首先指明,这里的一切优化都是针对分布式机器学习中的同步梯度下降。并且目前只考虑数据并行的分布式。
为什么需要调度GPU?
数据并行的形式化描述
数据并行的通常做法,是将数据集进行划分到各计算节点,各自训练之后求梯度,然后加和平均。一个形式化的描述如下:
设$\lbrace y_i,x_i\rbrace_{i=1}^n$是一个数据集,其中有$n$条数据,每条形如$(y_i,x_i)$,其中$x_i$表示输入,$y_i$表示预期输出。
目标函数定义为
\[F(w)=\sum_{i=1}^n\ell(x_i,y_i,w)+\Omega(w)\]其中$\ell(x_i,y_i,w)$是一个参数为$w$的损失函数,$\Omega(w)$为正则化项。那么一个分布式的求$F(w)$最小值的算法可以描述如下:
总共$T$轮迭代,在第$t(1\leq t \leq T)$轮迭代中,共$m$个计算节点需要进行如下工作:
对训练数据集划分为$m$份,第$r$份的样本数为$n_r$。对于第$r(1\leq r \leq m)$个计算节点,读取第$r$个子训练集,$\lbrace y_{i_k},x_{i_k}\rbrace_{k=1}^{n_r}$,计算梯度:
\[g_r^{(t)}\leftarrow \sum_{k=1}^{n_r}\partial\ell(x_{i_k},y_{i_k},w_r^{(t)})\]对$m$个计算节点获得的梯度求和(也有求平均的,对步长$\eta$的调整不同),之后做梯度下降:
\[\begin{split} g^{(t)}&\leftarrow \sum_{r=1}^m g_r^{(t)} \\ w^{(t+1)}&\leftarrow w^{(t)}-\eta(g^{(t)}+\partial\Omega(w^{(t)})) \end{split}\]时间开销分析
- 数据集传输时间:数据集需要时间传输到各个节点上(无论是一开始就划分好了还是过程中传输都需要)
- 计算时间:计算梯度需要时间
- 同步时间:梯度需要加和,并且更新后的参数$w$需要广播到所有计算节点
以下的优化针对同步时间。
GPU的特点
对于单机多卡训练而言,GPU的数据传输时间很容易成为计算瓶颈。考虑到一般都会将某一个GPU映射为一个计算节点,此时同步算法就显得格外重要。
如何优化
GPU拓扑结构
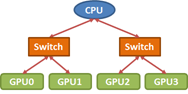
目前绝大多数Nvidia GPU服务器的GPU互联结构都是一颗PCIe二叉树,
在一台GPU服务器上执行nvidia-smi topo -m命令,可以输出GPU拓扑结构的矩阵形式。例如,一个16GPU的服务器如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
root@compute-0-1:/# nvidia-smi topo -m
GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU8 GPU9 GPU10 GPU11 GPU12 GPU13 GPU14 GPU15 mlx4_0 CPU Affinity
GPU0 X PIX PXB PXB PHB PHB PHB PHB SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU1 PIX X PXB PXB PHB PHB PHB PHB SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU2 PXB PXB X PIX PHB PHB PHB PHB SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU3 PXB PXB PIX X PHB PHB PHB PHB SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU4 PHB PHB PHB PHB X PIX PXB PXB SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU5 PHB PHB PHB PHB PIX X PXB PXB SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU6 PHB PHB PHB PHB PXB PXB X PIX SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU7 PHB PHB PHB PHB PXB PXB PIX X SYS SYS SYS SYS SYS SYS SYS SYS PHB 0-11,24-35
GPU8 SYS SYS SYS SYS SYS SYS SYS SYS X PIX PXB PXB PHB PHB PHB PHB SYS 12-23,36-47
GPU9 SYS SYS SYS SYS SYS SYS SYS SYS PIX X PXB PXB PHB PHB PHB PHB SYS 12-23,36-47
GPU10 SYS SYS SYS SYS SYS SYS SYS SYS PXB PXB X PIX PHB PHB PHB PHB SYS 12-23,36-47
GPU11 SYS SYS SYS SYS SYS SYS SYS SYS PXB PXB PIX X PHB PHB PHB PHB SYS 12-23,36-47
GPU12 SYS SYS SYS SYS SYS SYS SYS SYS PHB PHB PHB PHB X PIX PXB PXB SYS 12-23,36-47
GPU13 SYS SYS SYS SYS SYS SYS SYS SYS PHB PHB PHB PHB PIX X PXB PXB SYS 12-23,36-47
GPU14 SYS SYS SYS SYS SYS SYS SYS SYS PHB PHB PHB PHB PXB PXB X PIX SYS 12-23,36-47
GPU15 SYS SYS SYS SYS SYS SYS SYS SYS PHB PHB PHB PHB PXB PXB PIX X SYS 12-23,36-47
mlx4_0 PHB PHB PHB PHB PHB PHB PHB PHB SYS SYS SYS SYS SYS SYS SYS SYS X
Legend:
X = Self
SYS = Connection traversing PCIe as well as the SMP interconnect between NUMA nodes (e.g., QPI/UPI)
NODE = Connection traversing PCIe as well as the interconnect between PCIe Host Bridges within a NUMA node
PHB = Connection traversing PCIe as well as a PCIe Host Bridge (typically the CPU)
PXB = Connection traversing multiple PCIe switches (without traversing the PCIe Host Bridge)
PIX = Connection traversing a single PCIe switch
NV# = Connection traversing a bonded set of # NVLinks
NV#,PIX,PXB,PHB,SYS,越往后的传输速度越慢。对于没有NV#(即NVlink)的服务器,GPU的结构可以简单的建模为满二叉树。
Ring Allreduce
Ring Allreduce是高性能计算领域的经典算法,在Allreduce算法中被证明是带宽最优的。(见论文Bandwidth optimal all-reduce algorithms for clusters of workstations)。参数服务器等传统的通信结构与其相比之,在节点数量较多时,通信开销会增大。
目前主流的机器学习框架都支持NCCL后端进行通信(并声称这是Nvidia GPU上最快的通信后端)。而最新的NCCL已经将Ring Allreduce加入框架。因此,后面的优化是针对Ring Allreduce算法的。
近似优化算法
问题可以形式化的描述成:已知当前有$m$个空闲GPU,需要从当中找$n$个使得构成的环长度最短。即满二叉树$T$叶节点的最小回路$C_n$,二叉树接近树根的边权值更大。
为了简化问题,假设第$i$层的权值$d_i\gg d_{i+1}$,这当然是一个粗略的假设,实际上,只有接近上面的层数才会有这种差别。
那么下面的算法一定能够得到最小环。假设树$T$的高度为$h$
算法$f(T,m,n)$:
- 初始化$i\leftarrow h$
- 求出所有以第$i$层节点为根的子树中空闲GPU个数
- 如果存在某个子树中空闲节点数$\geq n$(可能有多个),转到第5步
- $i\leftarrow i -1$,转到2
- 对于所有满足条件的子树$T’$,计算其两颗子树中空闲叶节点个数$m_L,m_R$,$\forall n_L,n_R\in\mathbb{N},n_L+n_R=m,n_L\leq m_L,n_R\leq m_R$,在两棵子树中通过$f(T_L’,m_L,n_L),f(T_R’,m_R,n_R)$找最短路(不是回路),求出$\min_{T’}\lbrace f(T_L’,m_L,n_L)+f(T_R’,m_R,n_R)\rbrace$,得到最小路径对应的叶节点首尾依次相连即为最小环路
当然,这个算法实际对于更弱的条件$\require{enclose} \enclose{horizontalstrike}{d_i\geq d_{i+1}}$(我错了,这个条件太弱被我自己的反例推翻了),以及任意树都可以推广。
更有趣的是,该算法对于Parameter Server架构也会获得最优解。如果减弱条件为$d_i>d_{i+1}$,该算法对于Parameter Server架构仍然会获得最优解。对于Ring Allreduce,会获得一个$\frac{m}{2}-$近似解,并且最差情况可以构造出来。当然实际测试的时候基本没有出现这种极端情况。
具体证明当然只会在我的毕业论文里😜。

This work is licensed under a
Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International license.